Dave Bullock / eecue
Photographer
Engineering Leader
Nerd
Photos
|
Tags
|
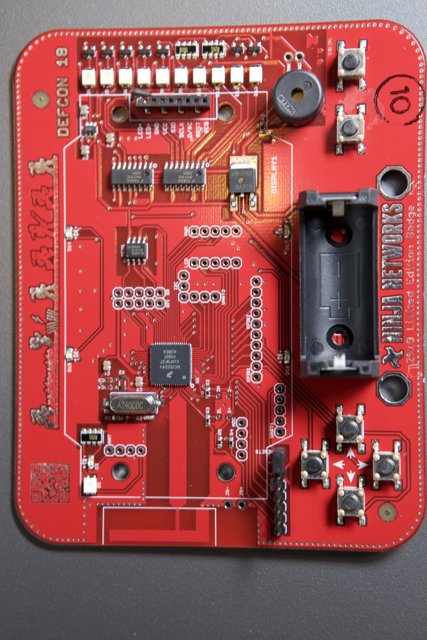
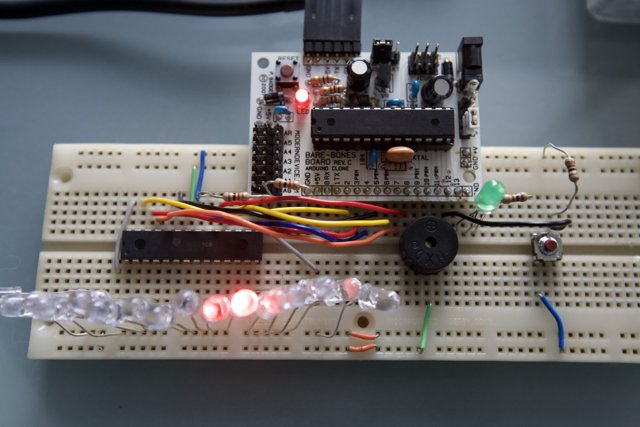
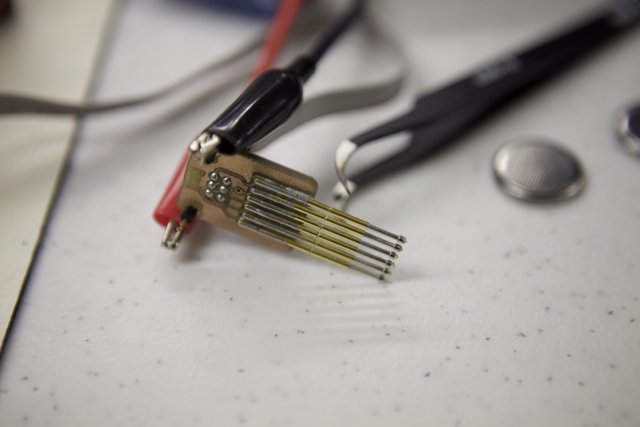
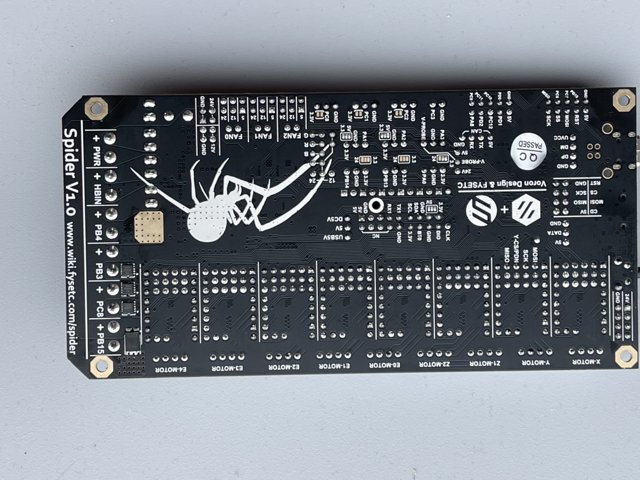
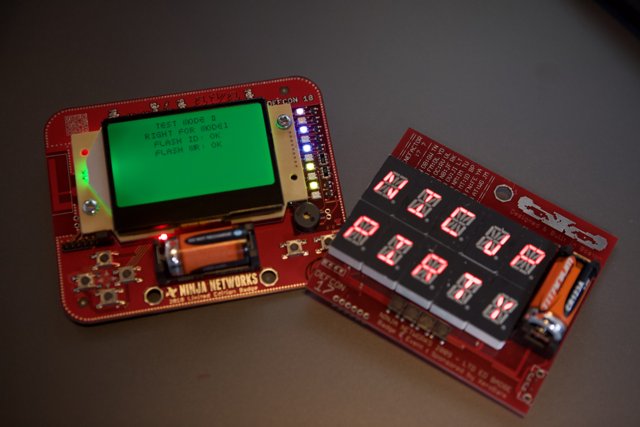
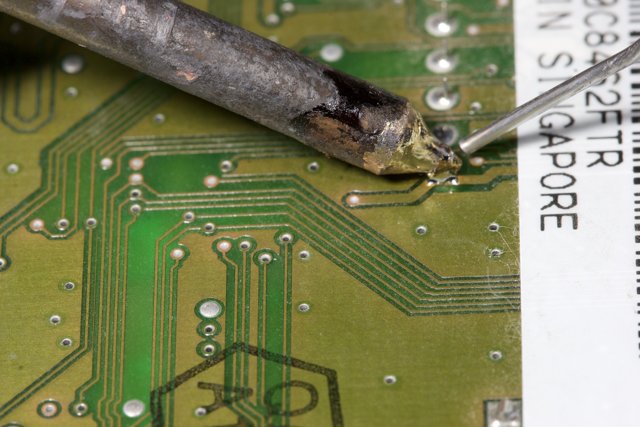
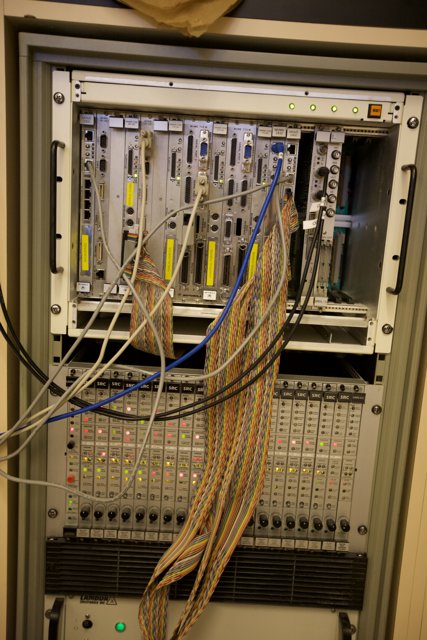
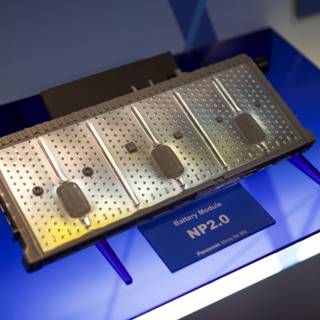
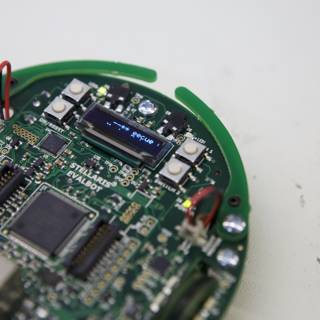
Hardware
Sort:
Name
Score
Date
Display:
Gallery
Thumbs
Load more...